

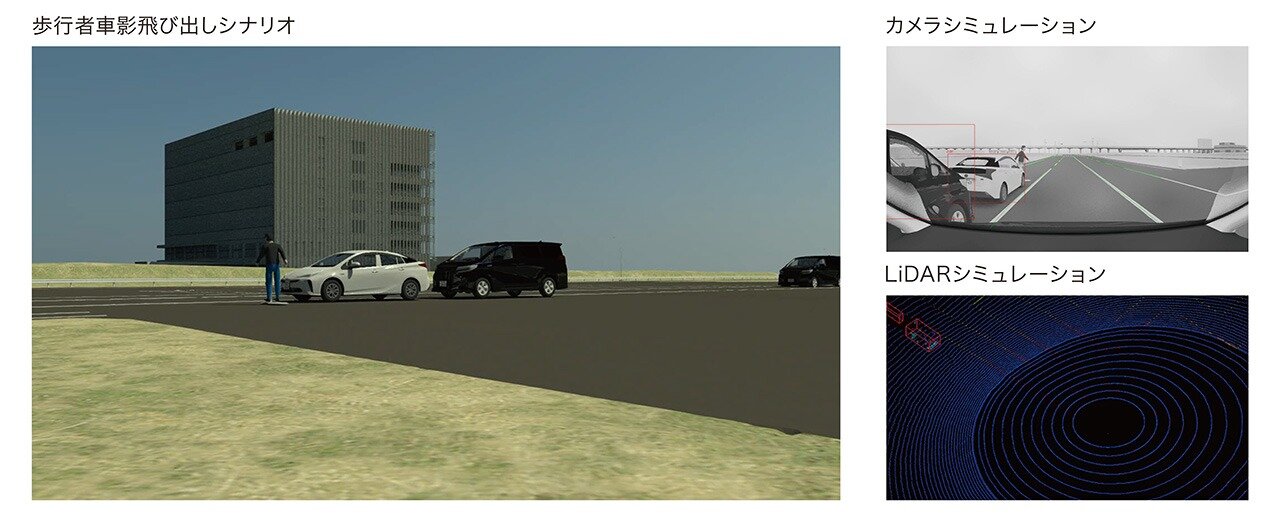
安全な自動運転車の開発のため、様々な交通環境を仮想空間で再現できる実現象と一致性の高いシミュレータを開発しています
自動運転の普及に向け社会的受容性を醸成するためには、安全性の確保が不可欠です。
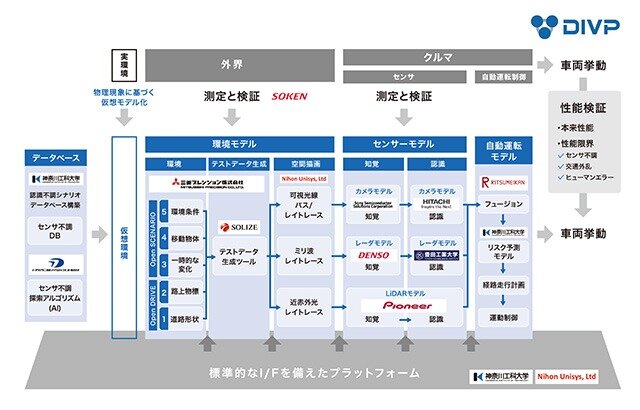
特に、システムの外界との接点となるカメラ、レーダ、LiDAR等の各種センサを同時に評価ができるシミュレーション評価基盤の構築が求められています。
DIVP®(Driving Intelligence Validation
Platform)コンソーシアムではシミュレーションを活用した安全性評価環境の構築を行い、シミュレーションに係るツールとインターフェース等を自動車メーカ、サプライヤ間で共通化することにより、業界全体としてレベルアップを図り、産業競争力の向上を目指しています。
主要な研究成果
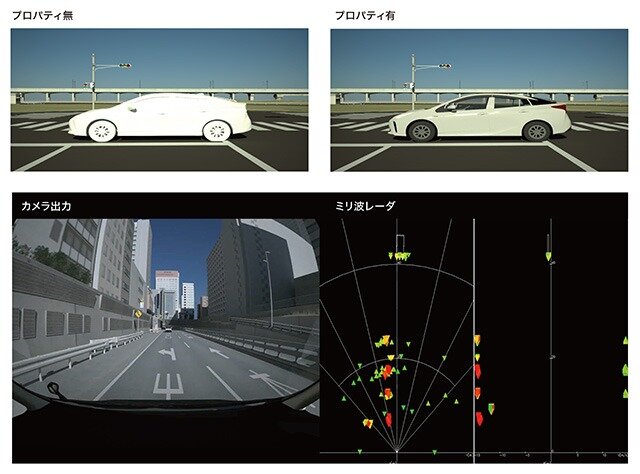
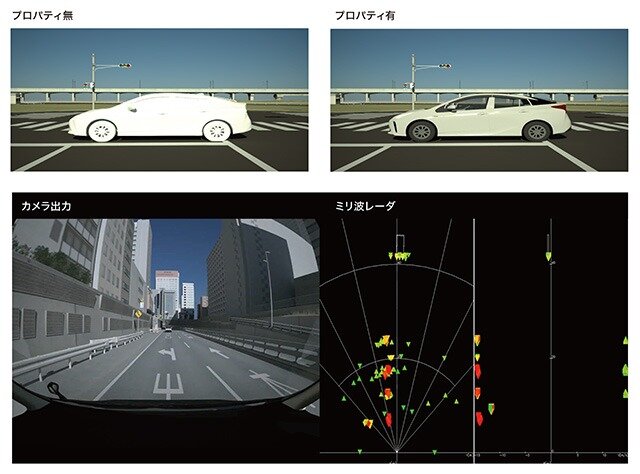
実験計測に基づき反射プロパティを設定、一致性の高い評価環境によるセンサ評価を可能にしています
研究計画と社会実装
シミュレーション評価基盤の性能向上とプロセス化を進めると共に、2021年度からはデータベースの構築に着手、2022年の社会実装を目指します

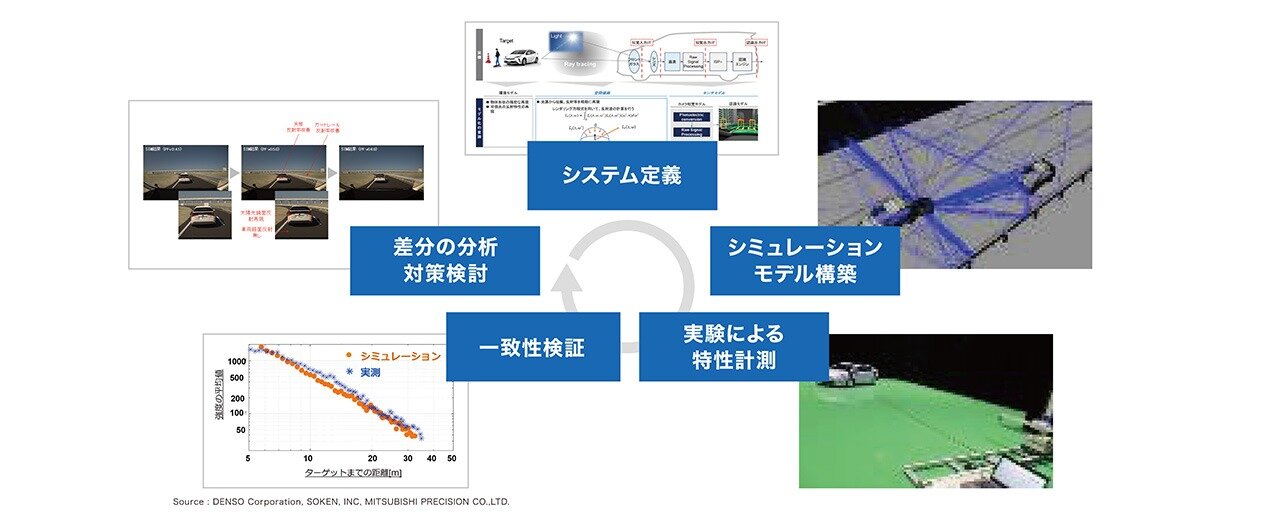
物理現象に基づきセンサ原理をシミュレーションモデル化し、実験計測による一致性検証を行い、高度な一致性を有するシミュレーション評価環境を実現しました。
研究開発には専門的な知見を有す12のエキスパート団体が参加しております。
モデル化のプロセス
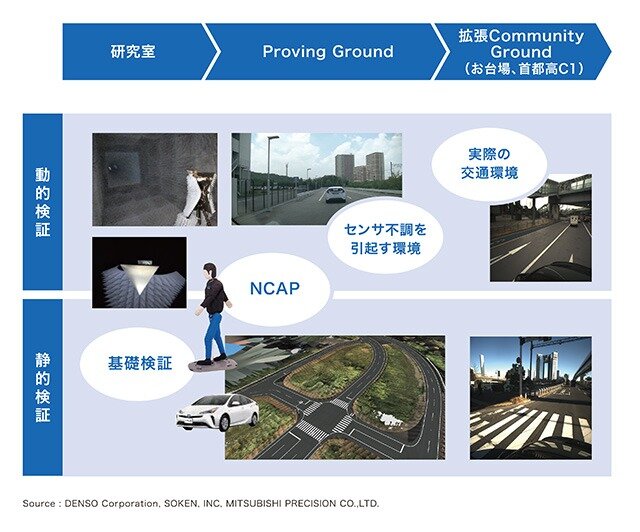
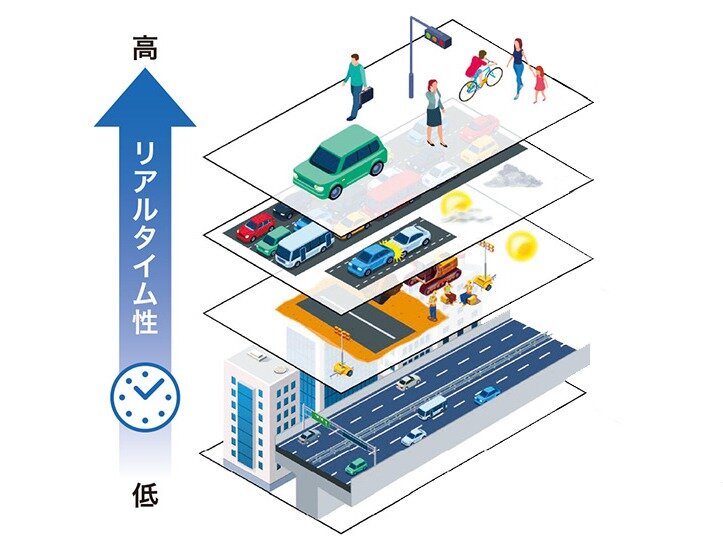
拡張のロードマップ
実験検証に基づき研究室での検証から、Virtual-Community Ground(バーチャルコミュニティグラウンド)まで拡張を行いました。
DIVP®プロジェクト設計
各分野に専門性を有す12団体でDIVP®コンソーシアムを形成、研究開発を進めています。
Virtual-Proving Ground(バーチャルプルーヴインググラウンド)におけるEuro-NCAP評価を一部実現。
2025年に向けて継続的な拡張を進めます。
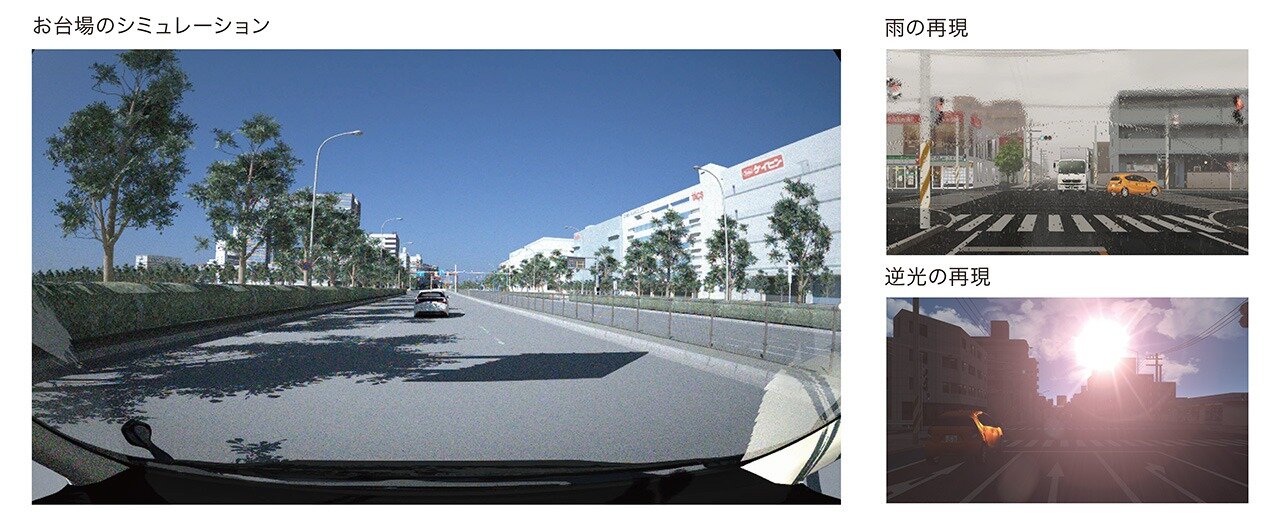
自動運転の安全性検証のためのセンサ評価に重点を置いており、センサ不調のシミュレーションが可能なVirtual-Community
Ground(バーチャルコミュニティグラウンド)としてお台場や首都高C1を構築しました。
NCAPプロトコルのシミュレーション
お台場シミュレーション
SIP自動運転は、引き続き人文・社会科学の視点も含む総合知をフル活用して、Society5.0の具現化として社会構造を変革する自動運転社会の実現と、その先にある一人ひとりの多様な幸せの実現に貢献していきたいと思います。
この記事を見ている方はこちらも見ています

B1自動運転車の認識技術
B2ダイナミックマップのコンセプト
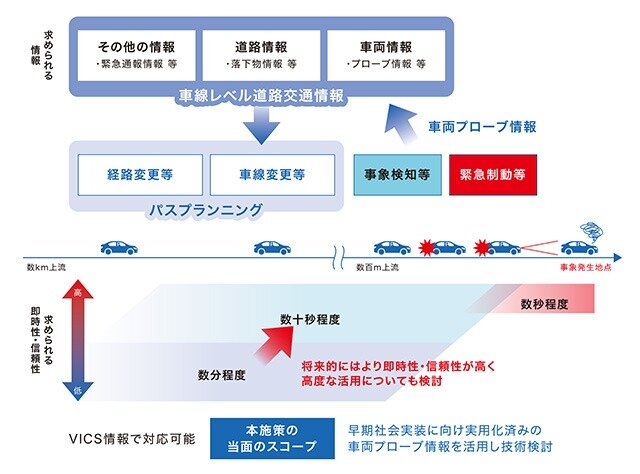
B3車両プローブ情報を活用した車線レベル道路交通情報の生成と配信

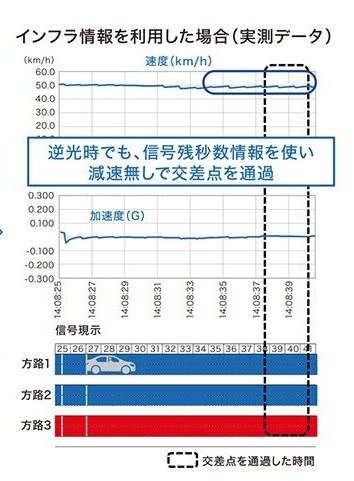
B4自動運転の実現に向けた信号情報提供技術の高度化

B5協調型自動運転を実現する通信方式の検討

B6東京臨海部実証実験の概要
B7a東京臨海部実証実験-臨海副都心地域(信号情報提供とインパクトアセスメント)
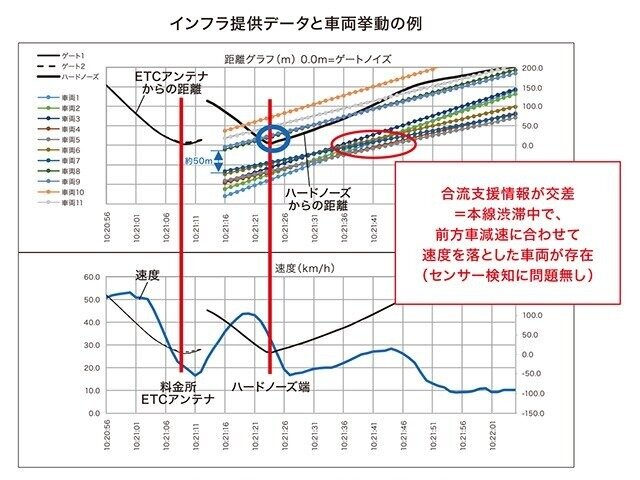
B7b東京臨海部実証実験-首都高速道路(合流支援情報とETCゲート開閉情報の活用)
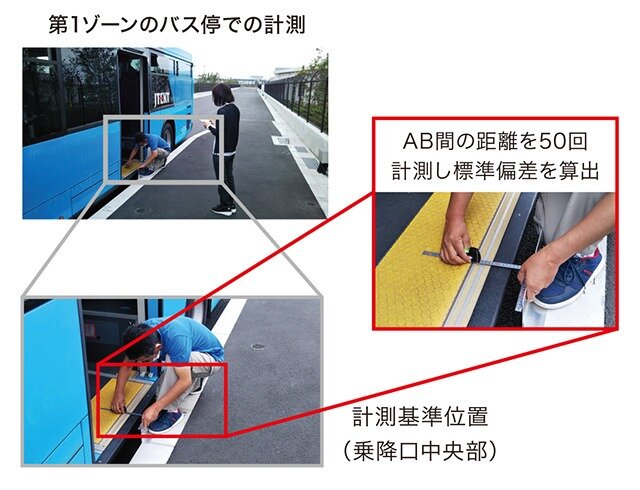
B7c東京臨海部実証実験-羽田空港地域(自動運転による次世代公共交通システム)
B8仮想空間における安全性評価技術の概要
B9サイバーセキュリティ(侵入検知システム(IDS)の評価方法)