menu


 屋外展示
屋外展示 自動運転が普及した世界を見据え、東京臨海部におけるロボットタクシーでの開発実証実験を日常的に実施。本実証を通じて、オープンソースの自動運転ソフトウェアAutowareの開発を進め、「自動運転の民主化」を目指します。

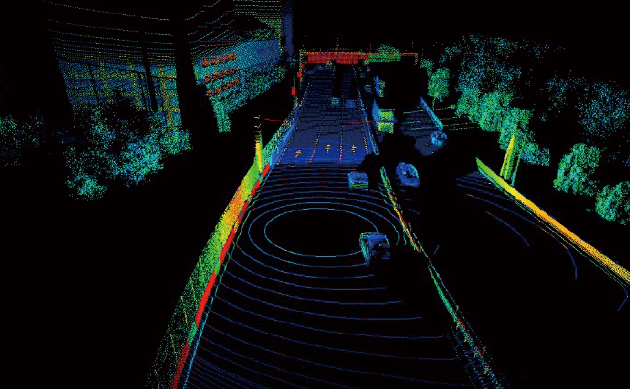
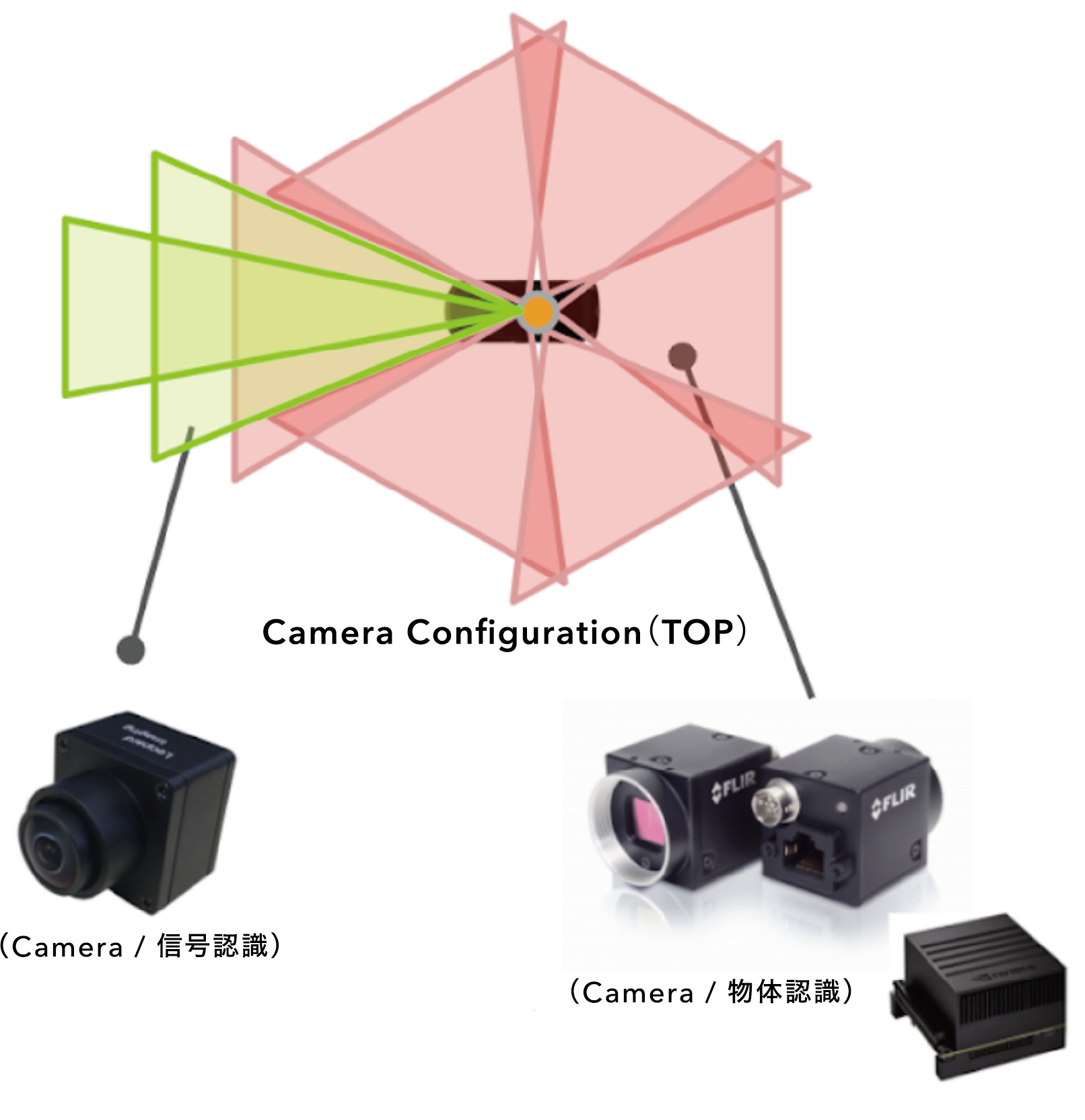
自動運転が普及した少し未来をイメージしたロボットタクシー車両です。世界初のオープンソースの自動運転ソフトウェア「Autoware」を搭載し、6台のLiDAR、6台の物体認識用カメラ、2台の信号認識用カメラなどリッチなセンサー構成となっています。
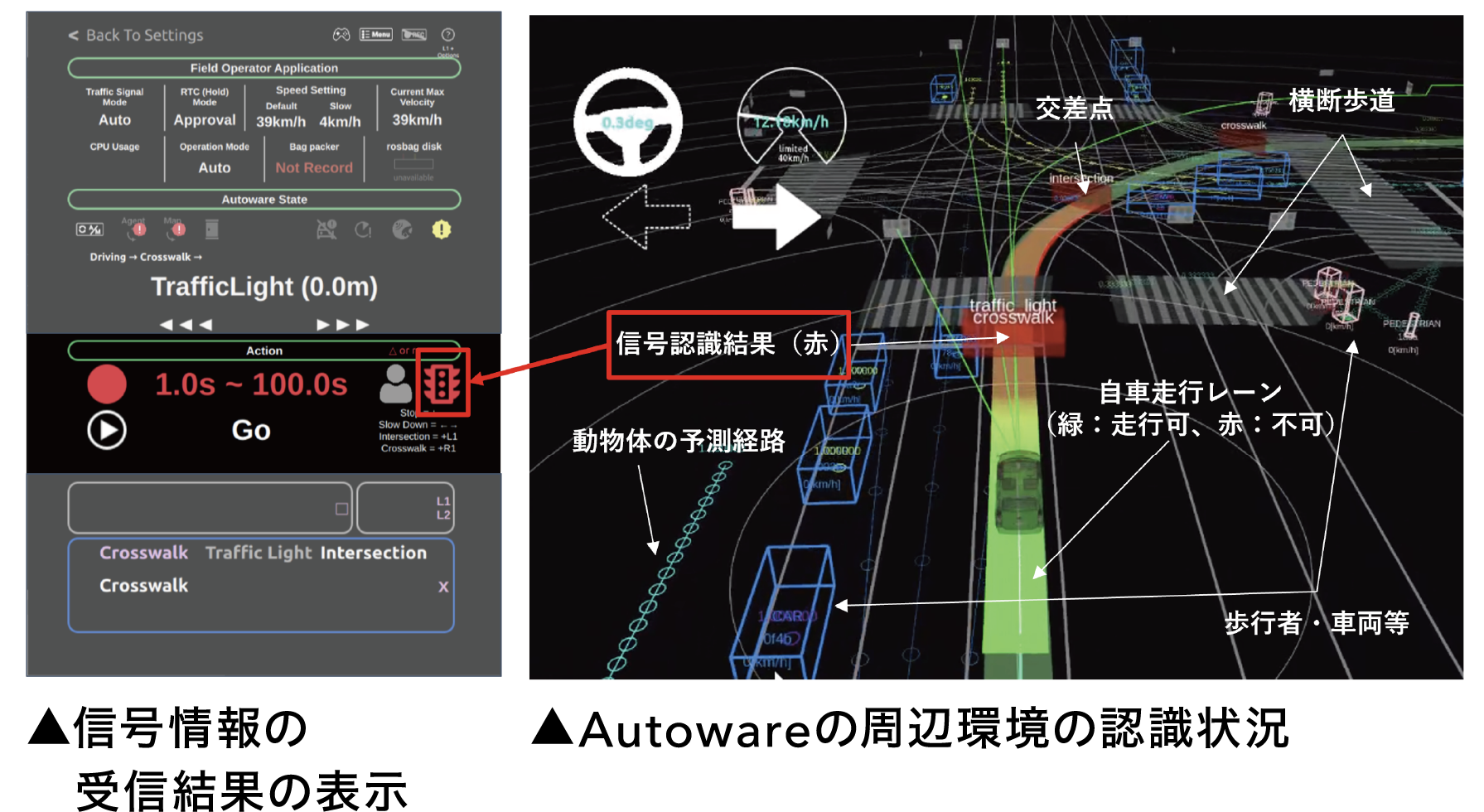
2020年度~2022年度には、SIP東京臨海部実証実験参加を通じて、信号情報連携の技術開発を行うとともに、日常的に都市部を走行する姿を見せることを通じて、社会的受容性の醸成にも寄与してきました。

様々な歩行者や車両が行き交う混在空間においては、起こりうるすべての事象をあらかじめ予測しきることは困難です。何をもって「安全」とし、安全設計をいかに確実に行い、安全性をどのように検証・説明するかといったことが、自動運転が世の中に広く受け入れてもらうようになるための今後の課題であると考えています。