実証実験の取組
東京臨海部実証実験
1.全体
(1) 概要
-
交通環境が複雑な一般道においては、車両が交差し、歩行者が往来するため、現時点では、車両に搭載されたセンサー等からの情報のみで自動運転を実現することは困難です。また高速道路においても、事前の本線の交通状況の確認が難しく、合流部の自動運転の継続が困難なケースがあります。これらのことから、道路交通インフラからの情報を提供することによって、自動運転の実現を図ります。
そこで、東京臨海部実証実験として、SIP第1期で実用化した「ダイナミックマップ」の高精度3次元地図情報(静的情報)に加え、2019年から道路交通インフラから提供される本線合流支援情報や渋滞情報、信号情報等の動的情報や準動的情報の自動運転技術への利活用を検証してきました。2021年は、新たに公衆広域ネットワークを利用して配信される交通環境情報の生成から配信のしくみと情報の有効性の検証(1-1.)や、東京臨海部実証実験のフィールドである臨海副都心地域を活用し、現在取り組んでいる仮想空間における検証プラットフォーム (DIVP®:Driving Intelligence Validation Platform)のリアル環境との一致性を検証するための実証実験(1-2.)を行い、国内外に対し我が国の技術のアピールを行いました。 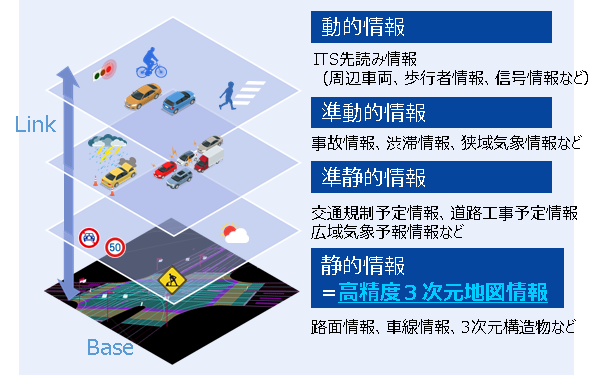
(2) 実施時期
- 2019年10月~2022年12月23日まで実施しました。
(3) お問い合わせ先
- 東京臨海部実証実験窓口 TEL:03-5308-0909(平日09:00~17:00)
(4) 参加者
-
東京臨海部実証実験は、内閣府が道路交通インフラの整備・提供を行い、参加者は実証実験に使用する自動運転車両や当該車両の運用及び運転手の整備と共に実験データの取得、分析、実験結果の報告等を行いました。
実証実験の参加者募集を行った結果、国内外の自動車メーカー、自動車部品メーカー、大学等計22機関が参加しました。国際的にも類を見ない多くの参加者による同一フィールドでの実験・データ取得、オープンな議論の場を提供することで、国際的な協調/標準化の推進を実施しました。
2021年7月現在
(5) 周知ポスター

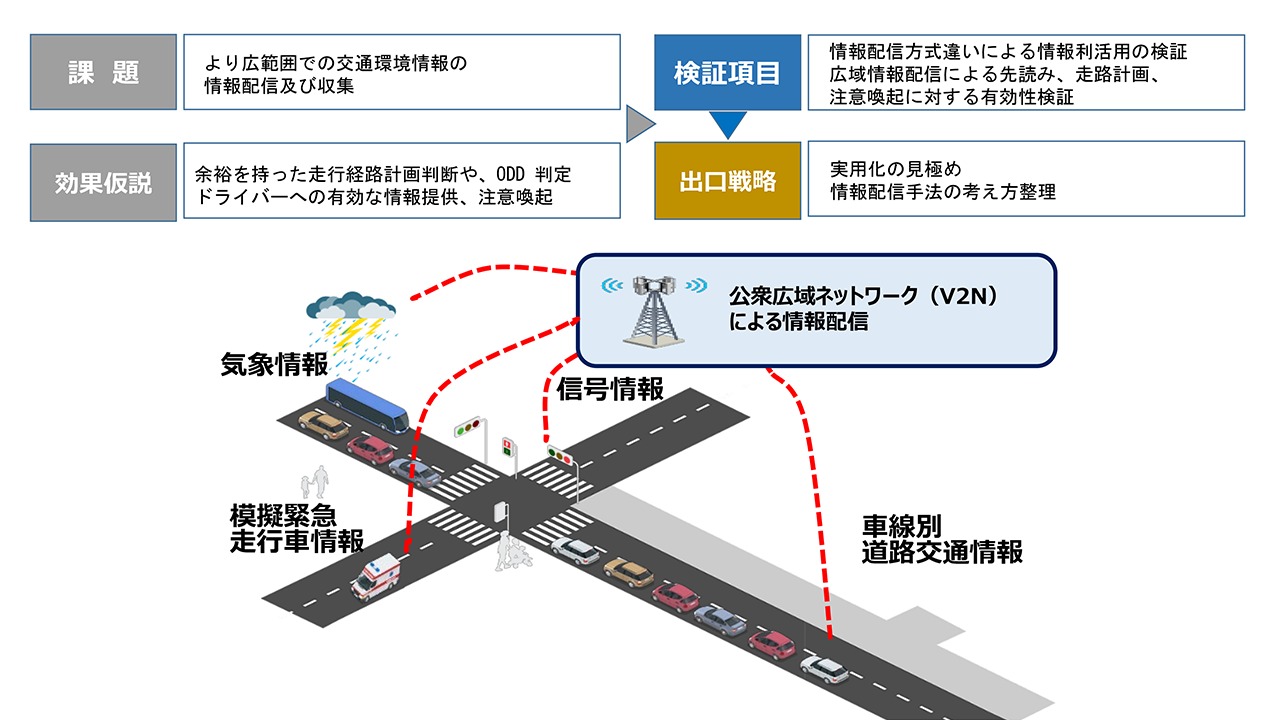
1-1. 公衆広域ネットワーク(V2N)による交通環境情報配信
(1) 概要
-
交通環境情報のさらなる広範囲での利用促進に向けて、これまでに整備してきた高精度3次元地図情報や、狭域通信(V2I)による信号情報や合流支援情報配信等による情報に加え、新たに公衆広域ネットワーク(V2N)を利用した交通環境情報を配信、利活用することが出来る実験環境を整えることで、より多様なユースケースにおける検証を実施しました。
新たな交通環境情報:車両プローブ情報を活用した車線別道路交通情報、気象情報、模擬緊急走行車情報、信号情報 など
(2) 実施時期
-
2021年10月~2022年3月末まで実施しました。
(3) 実証技術の例(V2Nによる実証実験)
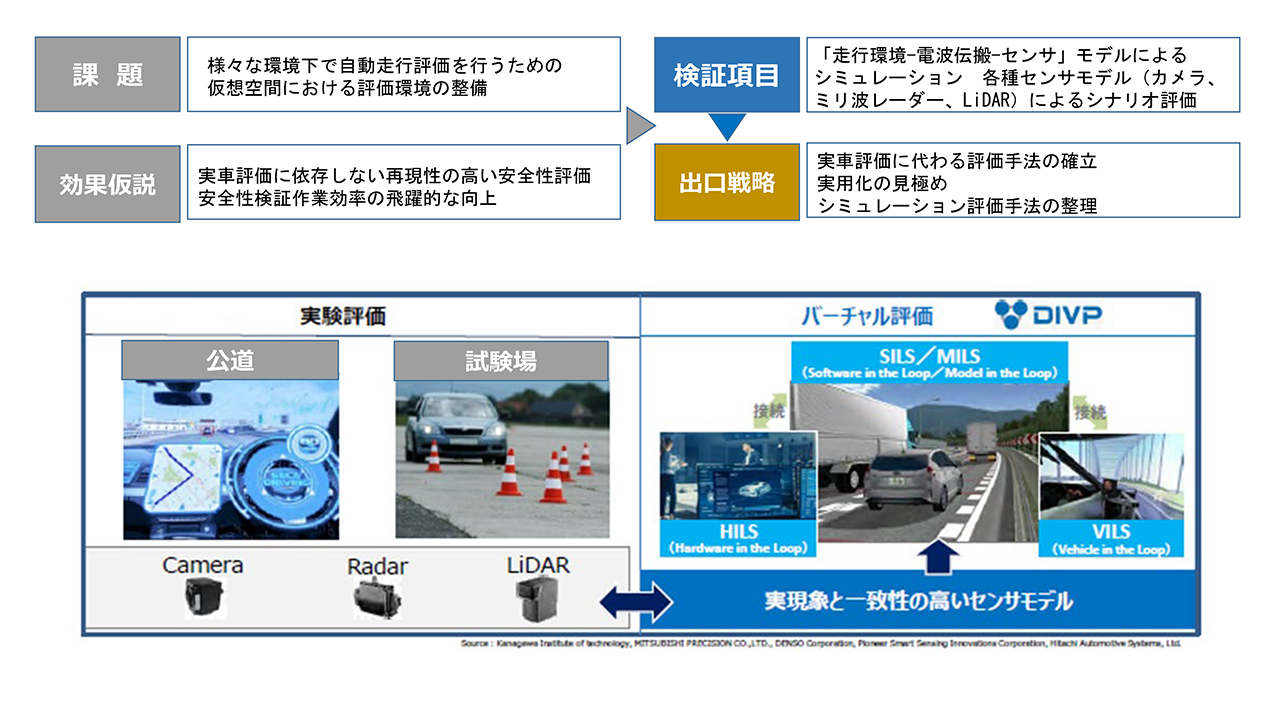
1-2. 仮想空間による安全性評価環境の構築
(1) 概要
-
様々な交通環境下で再現性の高い安全性評価を検証するため、リアルな環境における実験評価と代替可能な、実現象と一致性の高いシミュレーションモデル(走行環境-電波伝搬-センサ)を特徴とする、臨海副都心地域を中心とした仮想空間における検証プラットフォーム DIVP®(Driving Intelligence Validation Platform)の構築に取り組み、「走行環境-電波伝搬-センサ」モデルによるシミュレーションの有用性を検証しました。
(2) 実施時期
-
2021年11月~2022年4月末まで実施しました。
(3) 実証技術の例(シミュレーションによる実証実験)